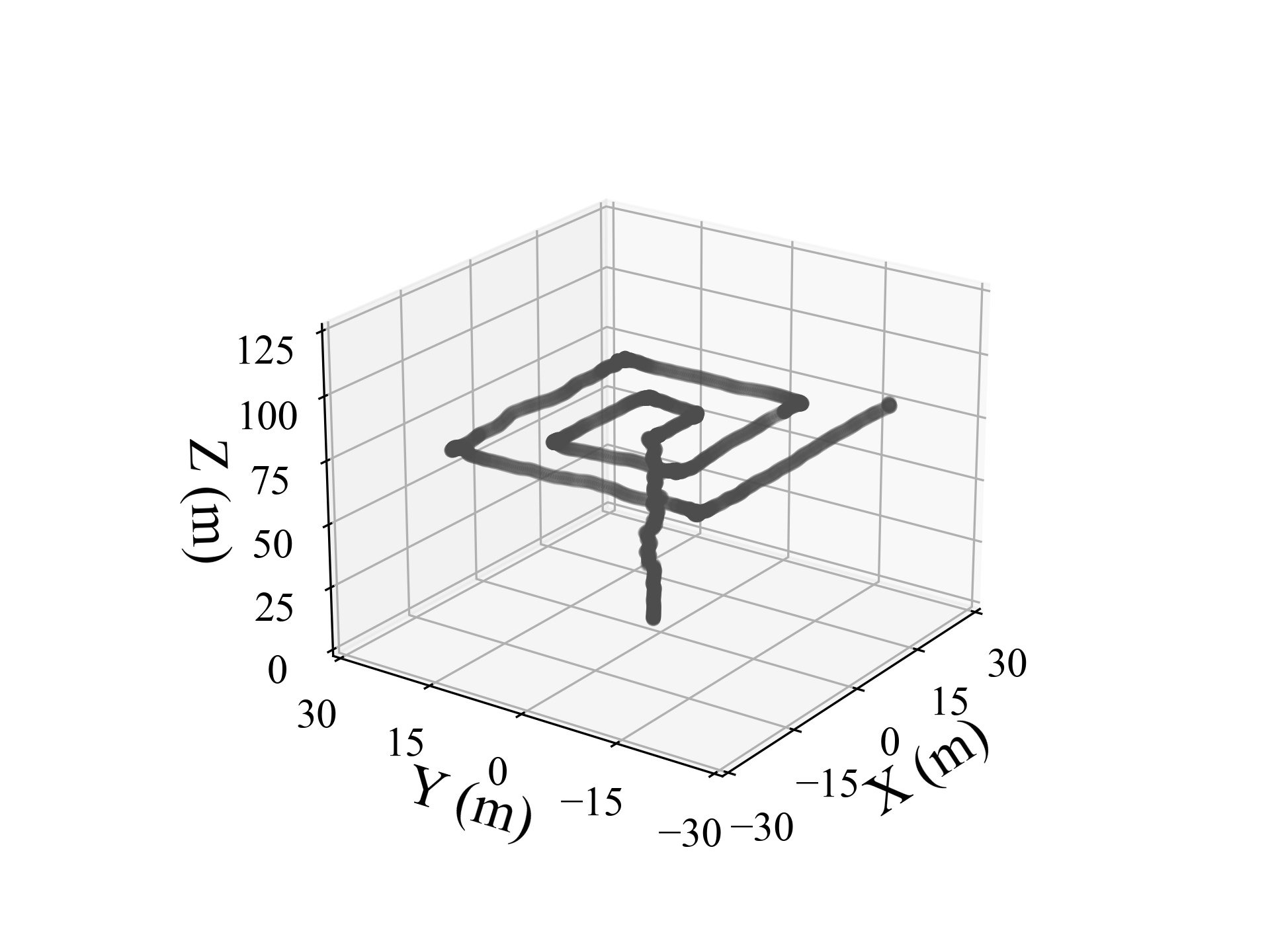
MicNest is capable of localizing drones flying at an altitude of 120 m (The maximum altitude that the local regulation allows). This means that we can localize the drone throughout the whole landing phase.

MicNest can accurately locate the drone and thus supports the precise landing of drones.
On average, the relative error, i.e., the absolute localization error over the distance to the platform, is only 0.5 %. For example, when the drone is at an altitude of 10 m, the localization error of MicNest is about 5 cm.

Our localization algorithm is fully optimized, which can report a new localization result to drones every 50 ms.

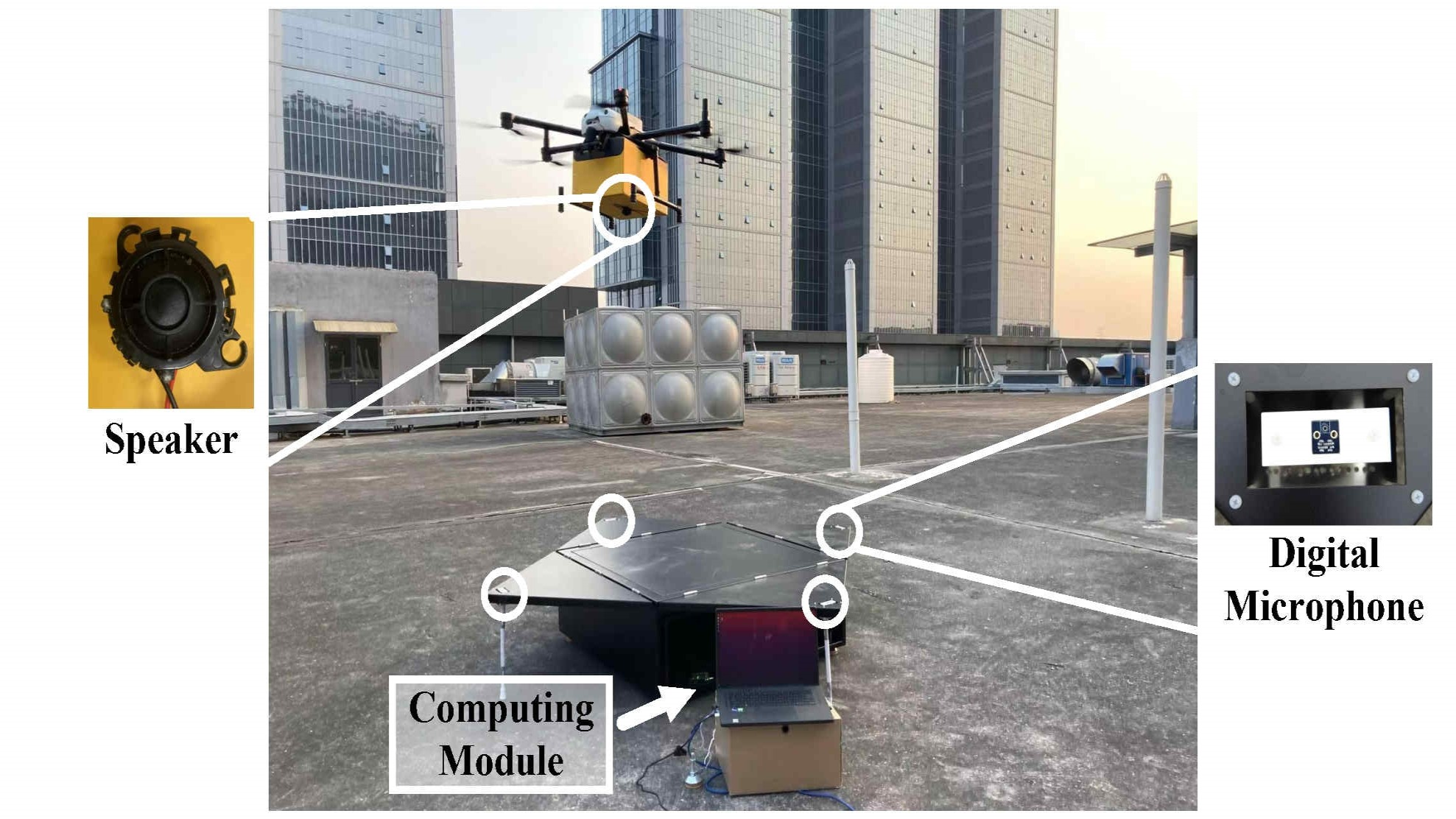
Each drone carries a speaker transmitting purposefully-designed acoustic pulses. Pseudo-Random Noise (PRN) modulation is introduced to generate these pulses. This design can bring the following characteristics:


Multiple microphones are deployed on a landing platform in carefully devised configurations to receive transmitted pulses.
However, pulse detection is challenging: (i) Because of limited transmission power, propagation attenuation, background noise, and propeller interference, the Signal-to-Noise Ratio (SNR) of received pulses is intrinsically low. (ii) the pulses experience non-linear Doppler distortion due to the physical drone dynamics while airborne.
To tackle these issues, we design a novel pulse detector, Matched Filter Tree (MFT), whose idea is to convert pulse detection to a tree search problem. MFT allows us to boost SNR gain at will while mitigating the Doppler distortion.
Once pulses are detected in each microphone, we can estimate time difference of arrivals (TDoAs) for different microphone pairs. These TDoAs will further trasmiited to the drone via, for example, WiFi. According to the received TDoAs, the drone can establish multiple hyperboloid equations.
Based on altitude sensors found aboard modern drones, such as barometers, ultrasound sensors, and downward-facing LIDARs, the 3D drone coordinates can thus be solved.

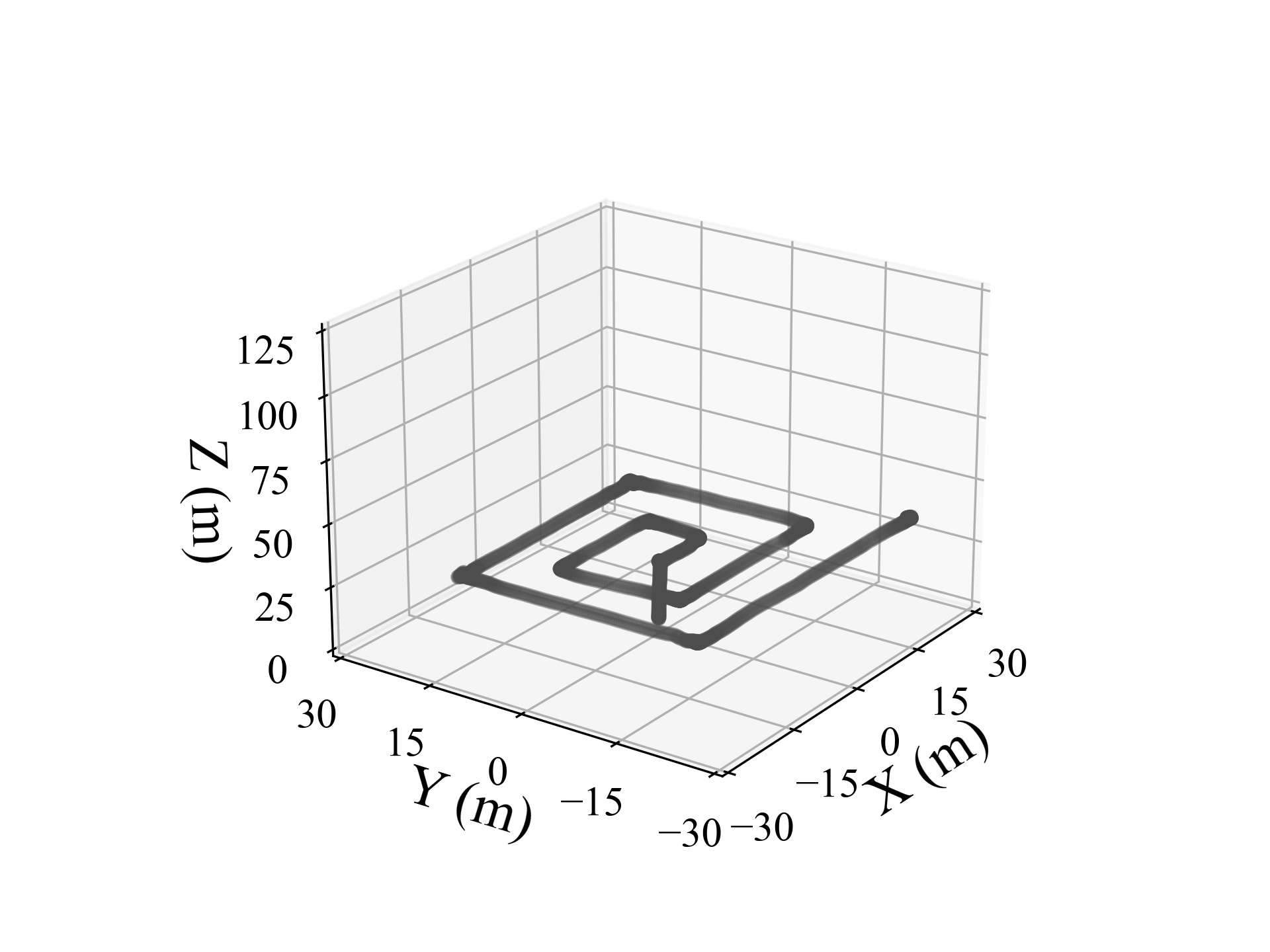
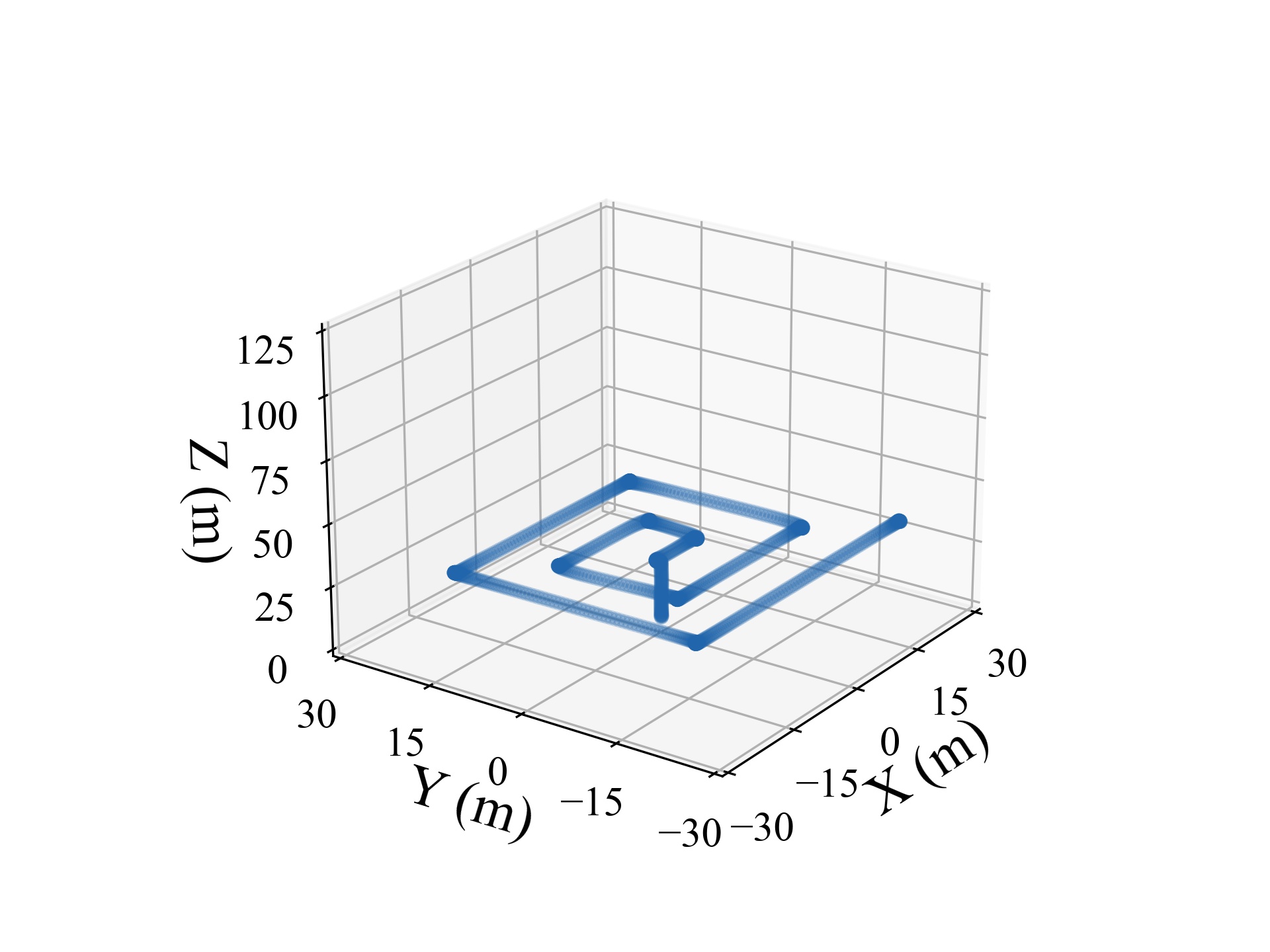
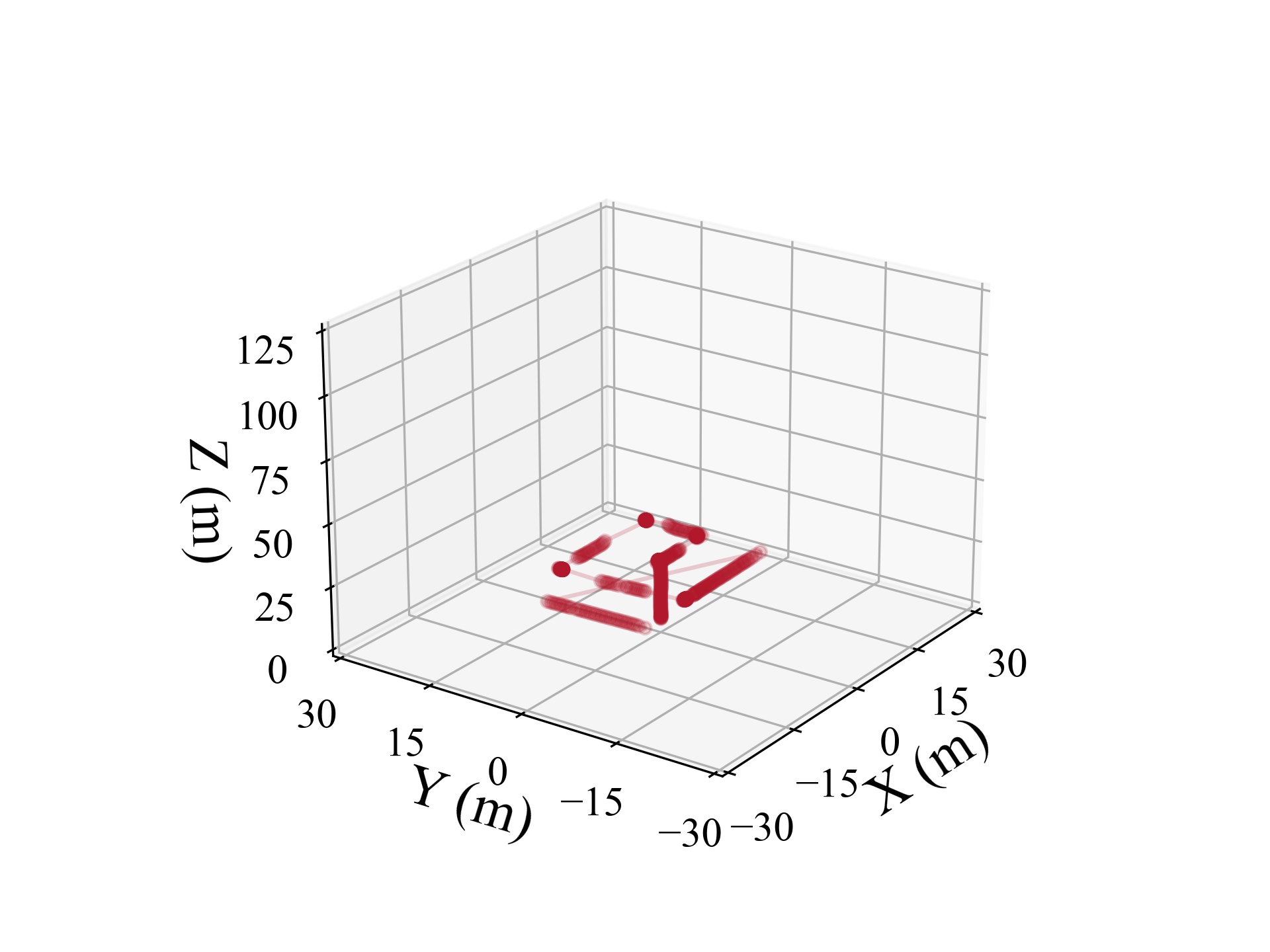
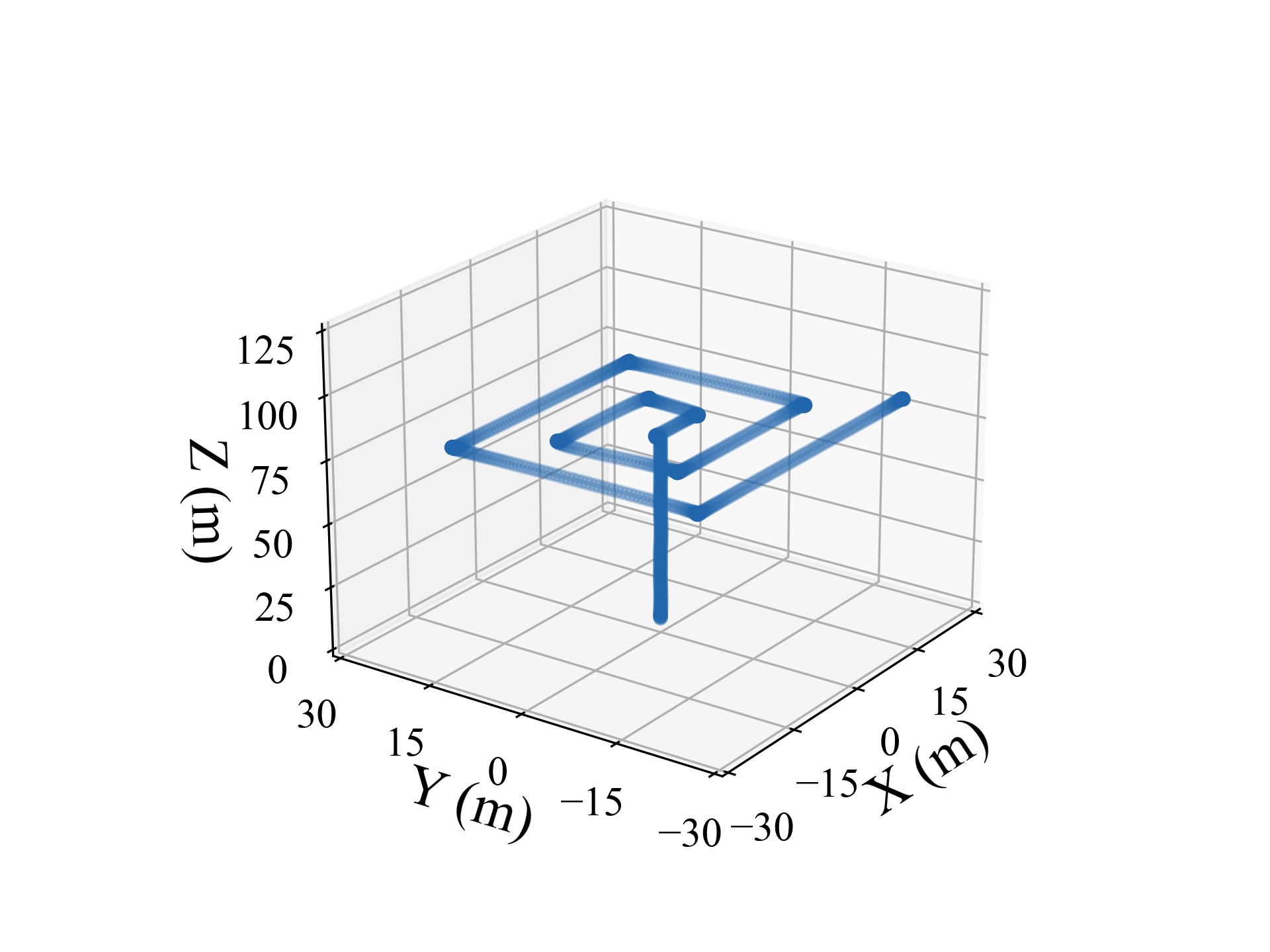
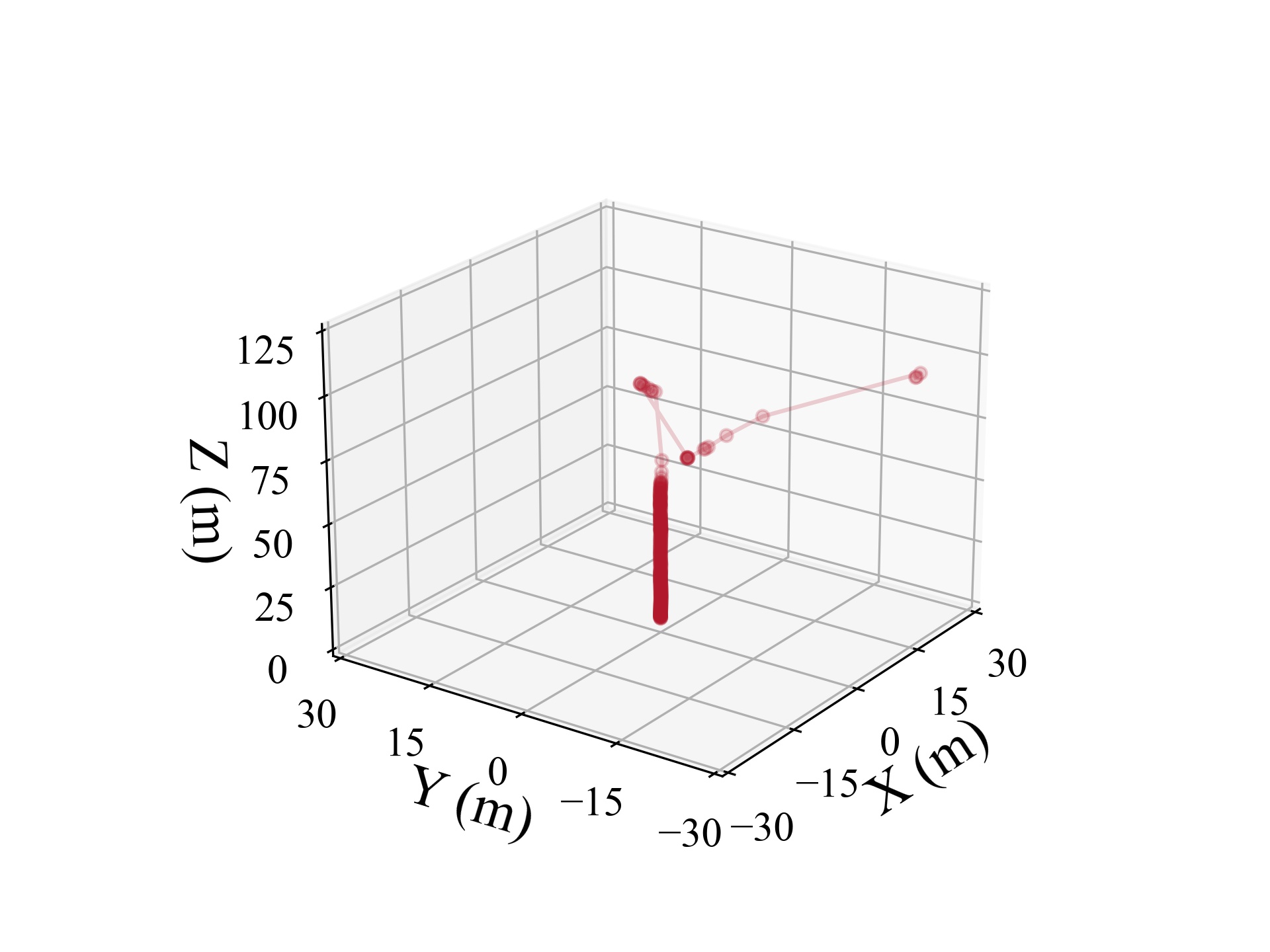
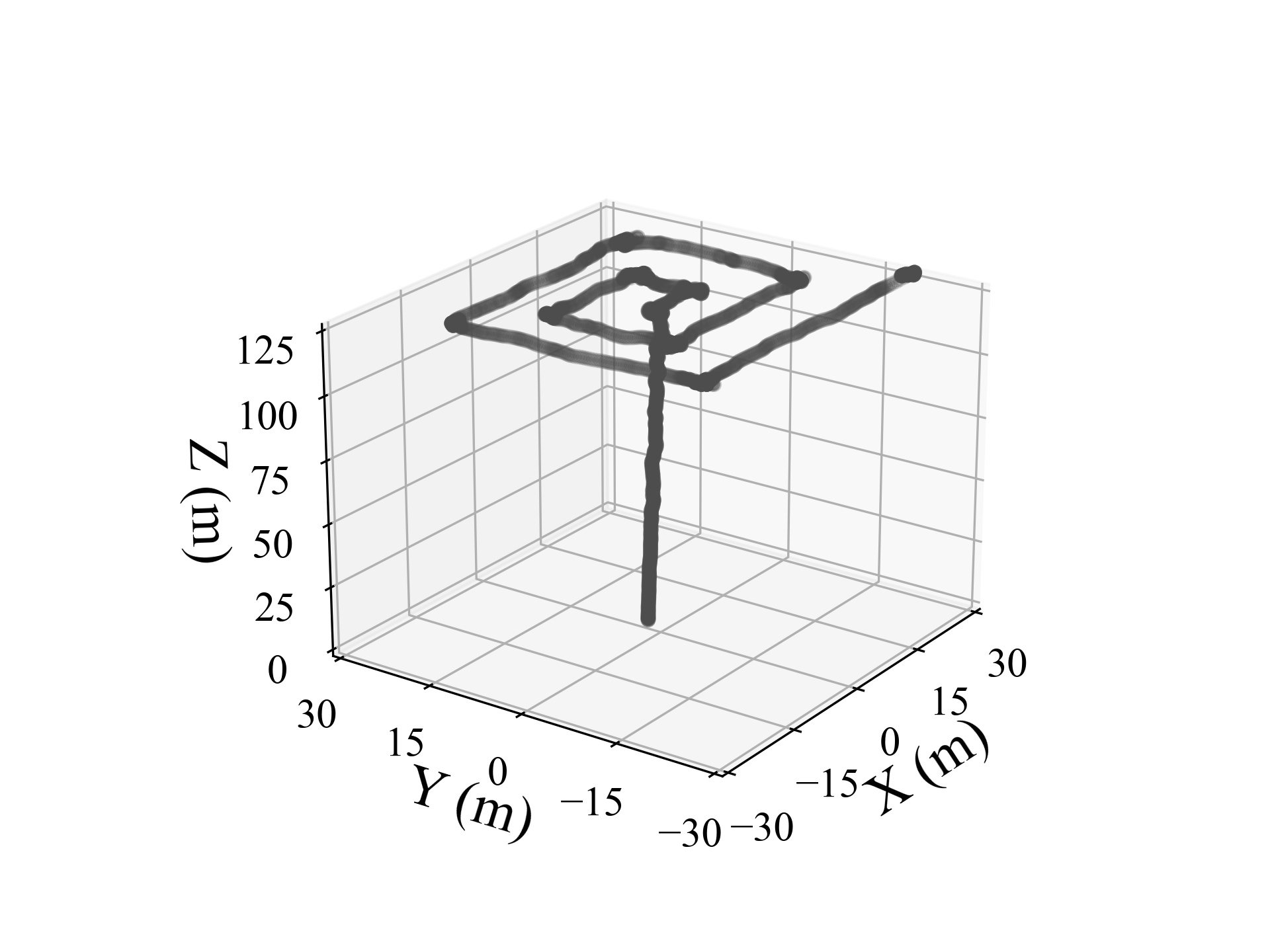
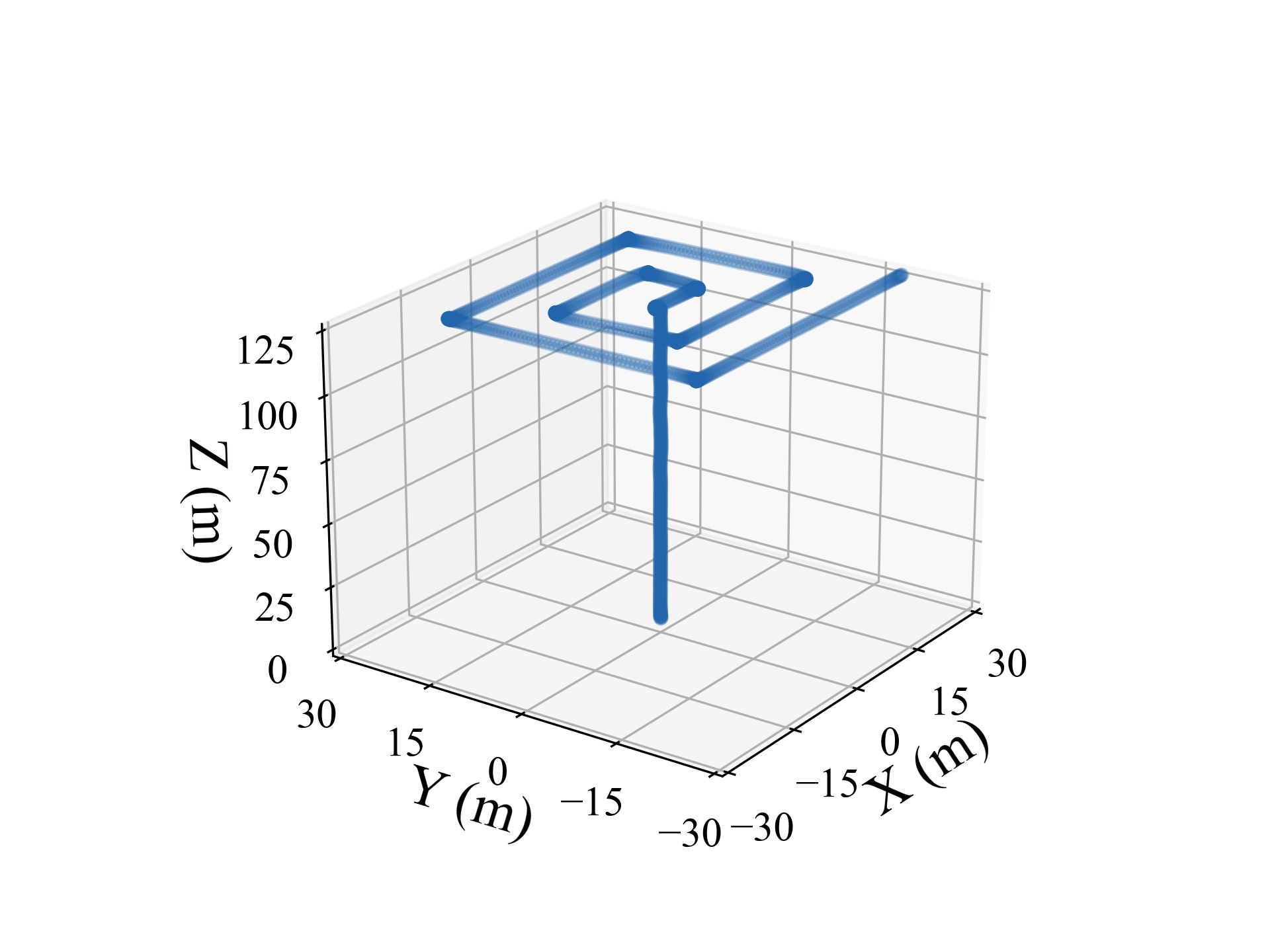
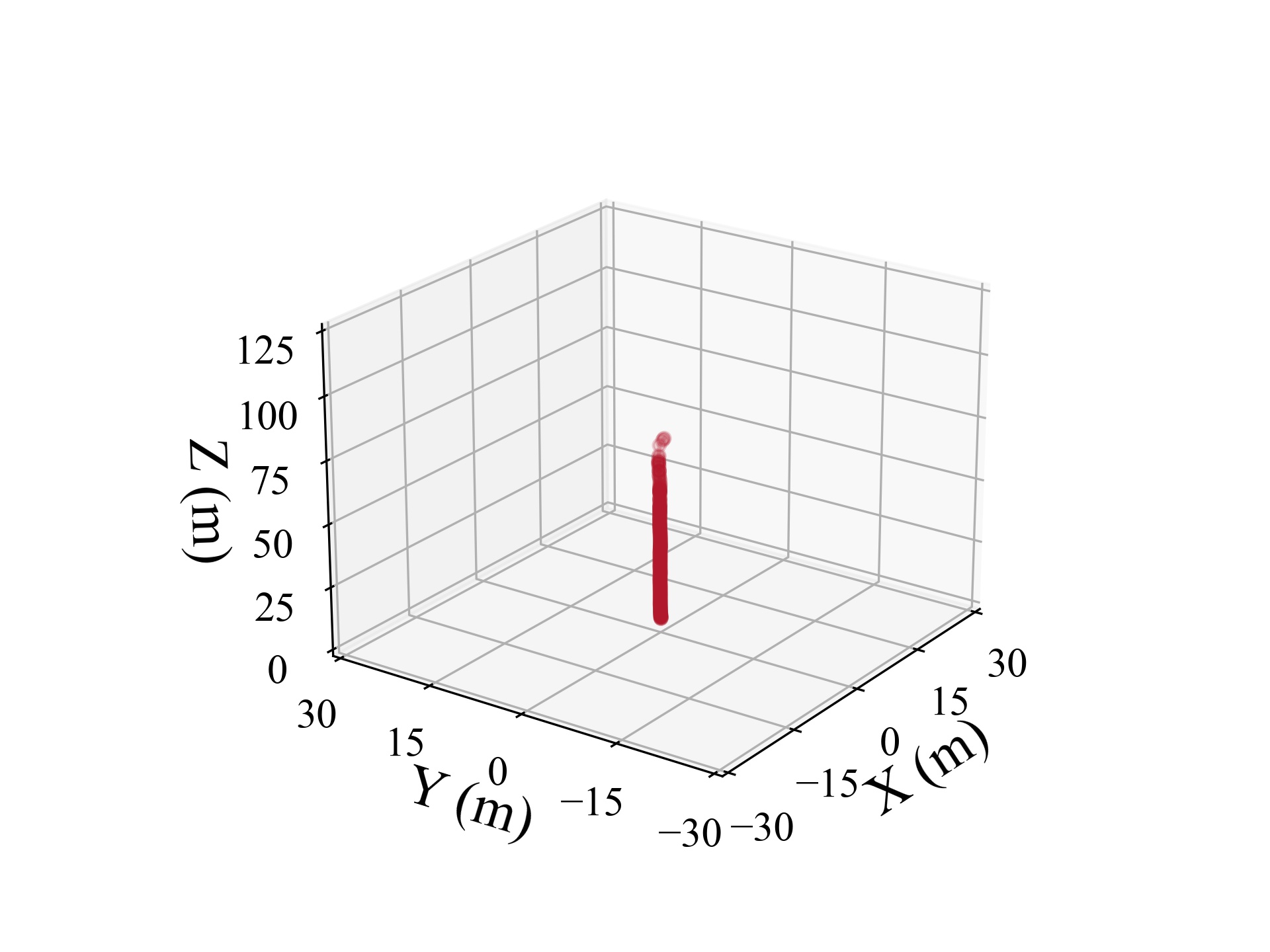
In this experiment, we compare the localization trajectories of different localization methods, including MicNest, RTK, and the visual marker.
In this experiment, the drone landed on the ground only relying on the MicNest localization results.

MicNest is rooted in the unique features of acoustic signals. The spatial resolution of a signal is proportional to its speed and inversely proportional to its bandwidth. Thus, the slower a signal is, the finer spatial resolution it can provide. Acoustic signals with a limited bandwidth, say 24 kHz, can provide a fine-grained spatial resolution, around 0.71 cm when the sampling rate is 48 kHz. In comparison, the spatial resolutions of RF signals like UWB with a 1.3 GHz bandwidth or mmWave with a 4 GHz bandwidth are 10 cm and 3.75 cm, respectively.
In general, MicNest can tolerate multipath effect as long as there is a line-of-sight (LOS) path between the microphones and the speaker. Thanks to the low sound speed, a slight difference in path lengths will lead to a distinguishable time difference of arrival. Therefore, the paths reflected from, for example, the surrounding buildings will not overlap with the LOS path in the time domain. Given that the LOS path is the strongest, we can implicitly determine the LOS path by choosing the most significant correlation peak.
This may be feasible, but a practical issue is that the drone size is limited, which sets an upper bound on the inter-microphone distance (aperture), resulting in a lower localization resolution. In addition, the computing resource of drones is generally not sufficient to support real-time pulse detection.
FMCW signals are resistant to Doppler effect. However, it is linear Doppler effect that FMCW can resists to, not non-linear one. In addition, FMCW signals cannot satisfy the practical requirements such as being friendly to human ear or resistant to impersonation attacks.
Faculty
Tsinghua University
Email: heyuan@tsinghua.edu.cn
Homepage: http://www.greenorbs.org/people/heyuan/
Politecnico di Milano and RI.SE Sweden
Homepage: https://mottola.faculty.polimi.it/
Student
Tsinghua University
Email: wwg18@mails.tsinghua.edu.cn
Homepage: https://wangwg1996.github.io/
Tsinghua University
Tsinghua University
Tsinghua University